Grasping Regression
Introduction
Knowing how to grab an object is an essential skill for robots, it allows manipulation,
kit creation or even automated sorting ... To be efficient in an open world,
a robot must be able to catch any kind of object, even unfamiliar objects. Use
of deep learning then seems interesting because of its high quality of generalization. In
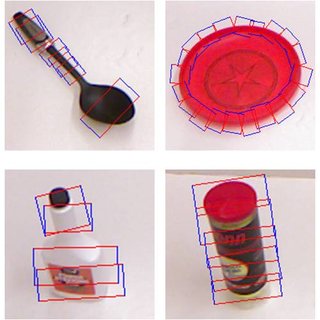
this mini-project, we therefore propose to create a model to determine the parameters of
grasping on an object. For this, we will use the Cornell database
In order to be able to carry out your python project, you will use a jupyter file.
HomeWork
The work to be done is detailed by following the jupyter file: Automatic Grasping. Below, the different points you will discuss:
- Creation of a neural network for grasping rectangle prediction
- Network performance assessment
- Writing a Custom Loss Function
- Writing of a data augmentation class to improve generalization capabilities
Deliverables
The Deliverables to be provided are:
- A pdf report of about 10 pages explaining the subject, the choice of your approach, the implementation, the tests carried out, and the careful analysis of the results.
- Commented Python files.
To help you, here is a notebook detailing the different stages of a deep learning project (RESSOURCE). Do not hesitate to use this as inspiration when creating networks in the future.