






A new article accepted in Neurocomputing
with my colleagues Joris Guérin (LAAS), Stéphane Thiery, Eric Nyiri (Arts & Métiers) and
Byron Boots (University of Washington) .
This paper aims at providing insight on the use of pretrained CNN features for image clustering.
Extensive experiments show that the choice of the CNN architecture for feature extraction has a huge
impact on the final clustering. They also demonstrate that
proper extractor selection for a given IC task is difficult.
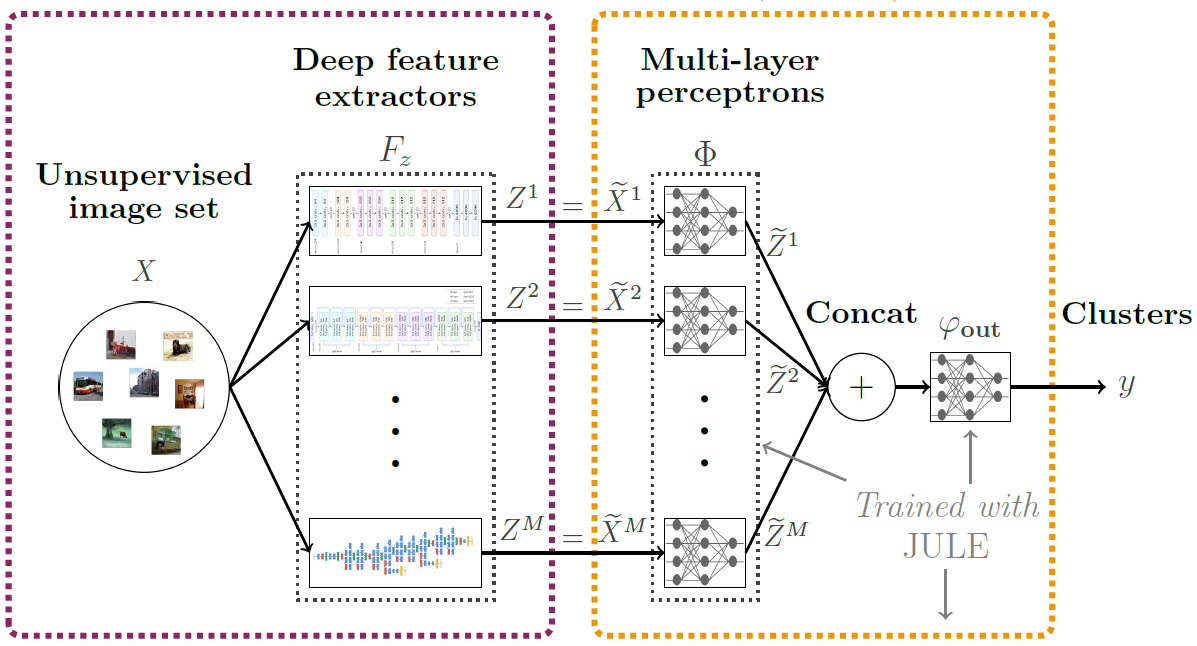
We propose a multi-input neural
network architecture that is trained end-to-end to solve MVC issues.